陀螺经纬仪的使用
出处:按学科分类—工业技术 中国建材工业出版社《工程测量实用技术手册》第476页(10056字)
1.陀螺经纬仪基本结构
目前使用的陀螺经纬仪都是由陀螺仪、经纬仪、陀螺电源和三脚架四部分构成。陀螺仪测定真北方向的基本原理在于高速旋转体陀螺有两个基本特性,即定轴性与进动性。
(1)陀螺仪
陀螺仪是由陀螺灵敏部、悬挂装置、光学系统、锁紧及限幅机构、磁屏蔽及支承壳体等主要部件组成。国产JD15陀螺仪的基本结构如图18-89所示。陀螺仪的核心是装在密封的充氢的陀螺房中陀螺电动机,通过悬挂柱由悬挂带悬挂起来,用两根导流丝和悬挂带及旁路结构给其供电。在悬挂柱上装有反光镜。它们共同构成了陀螺仪的灵敏部。
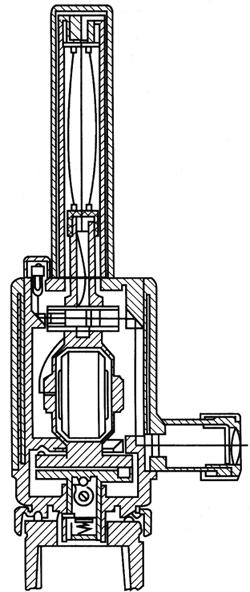
图18-89 陀螺仪的基本结构
与陀螺支架固连在一起的光标线经反光棱镜、反光镜反射后,再通过物镜组成像在目镜分划板上,构成了反射式光学系统(图18-90)。光标像在目镜视场摆动反映了陀螺灵敏部的摆动。反射式光路系统有以下特点:

图18-90 反射式光学系统
1)可减少因经纬仪整平不精确而引起的方向误差;
2)可进一步提高光标像运动的平整度;
3)使光标像运动速度加快,相应地提高了跟踪灵敏度。
转动仪器外部的手轮,通过凸轮带动锁紧跟踪机构的升降,使陀螺灵敏部托起(锁紧)式下放(摆动)。仪器外壳内壁和底部装有磁屏蔽罩,用于防止外界磁场的干扰。磁屏蔽的材料为坡莫合金。导磁率不低于0.125H/m(相当于以往的104Gs/Oe)。
(2)经纬仪及三脚架
陀螺仪和经纬仪的连接,靠经纬仪上部的桥形支架及罗纹压环的压紧来实现。二者连接的稳定性是通过桥形支架顶部三个球形顶针插入陀螺仪底部三条向心“V”形槽达到强制归心目的。
国产JT15陀螺仪采用徐州光学仪器厂生产的J6级经纬仪及三脚架安置。经纬仪一测回水平方向测量的方向中误差不大于±6″,竖直角测量中误差不大于±10″。仪器具有镜上中心与光学对光器。经纬仪净重3.81kg,仪器箱质量为3.4kg。三脚架质量为4.6kg,高度为970~1600mm。全套仪器质量为12kg。
(3)陀螺电源箱
JT15陀螺经纬仪采用DT4电动陀螺电动机。它要求电压36V、频率400Hz的三相交流电源来驱动。因此,陀螺电源是一个直流变交流的电子设备。为方便现场使用,特制便携式电源箱。箱内为上、下两部分:下部为一蓄电池组,由20节镉镍密封蓄电池串联而成,输出24V直流电,通过专用导线输给逆变器;上部为逆变器和充电器。电源箱的面板如图18-91所示,面板上以小表头为分界线,左半边为逆变器,右半边为充电器。表头及其下边的钮子开关可为两者公用。当钮子开关扳到左边时,指示的是电池电压。只有当指针位于红区内,才可以启动陀螺电动机。在启动后,指针仍在红区,表示电池电压充足,可以正常工作。指针位于黑区,则表示电池电压不足,陀螺电动机已不能正常工作,应及时制动和充电。当钮子开关扳在右边时,指示的是充电电源。此时分两挡,当右边钮子扳至“充电Ⅰ”是充电电流300mA,当扳至“充电Ⅱ”时,表示充电电流为600mA。

图18-91 JT15陀螺经纬仪电源箱的面板
2.陀螺仪工作原理
图18-92中是悬挂在地球表面某处的陀螺仪示意图。由于地球不断地由西向东转,对惯性空间来说,悬挂陀螺仪地点的重力方向不断变化,而陀螺房系统的重心又在悬挂点之下,重力将迫使陀螺轴维持在水平方向,相对于由外力不断地翻倒陀螺,这样总有一个指北方向的外力矩(重力矩)作用在陀螺房上,陀螺的动量矩按最小夹角方向,向外力矩方向进动,陀螺轴就作寻北运动。当进动到陀螺轴指真北时,陀螺动量矩与重力矩重合,应停止运动,但由于惯性,整个陀螺房仍停不下来。后由于空气的阻力、悬挂带的扭矩等作用,到一定位置(逆转点)停了下来,再向相反的方向重复前次的进动。结果就构成了一个围绕地轴(真北)的往复摆动,这摆动中心即是真北方向。
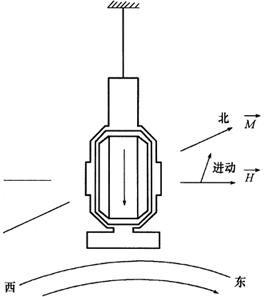
图18-92 悬挂的陀螺仪
如图18-92所示,在工作时转子接近水平,而重心朝下。假如开始转子轴处于水平而指向东北向,由于地球自转,子午线以东地面不断下降,使转子轴上翘,此时由于重力作用存在朝西向的一个摆性力矩,引起转子轴绕铅垂线方向朝子午线进动。地球不停地自转,使陀螺转子轴继续上翘直至子午线上,摆动力矩最大,因此转子轴将继续进动而穿过子午线,当转子轴处于子午线以西时,由于西部地平面不断上升,而使转子轴下倾,于是摆性力矩减小。在同开始的东北向等距离的西北向上,转子轴又一次处于水平位置。但地球的自转使转子轴继续下倾而低于水平面位置时,产生东向摆性力矩,这个力矩又使转子轴朝子午线方向进动,最后通过子午线返回到它的起始位置,整个过程如此重复进行。所以陀螺罗盘的主轴围绕子午线和水平线的运动呈椭圆轨迹。通过阻尼,使稳态时转子轴处于子午线上,它的北端稍微向上仰起,以便提供使陀螺以等于地球的恒星角度的铅垂分量(ωIEsinφ)来进动所需的力矩。
设J为转子的转动惯量, 为角速度矢量,
为角速度矢量, 为角加速度矢量,则角动量矩H=Jε,所需外力矩M=Jω。
为角加速度矢量,则角动量矩H=Jε,所需外力矩M=Jω。
陀螺经纬仪就是通过适当的光学系统观测陀螺摆动的停止位置(逆转点)来测定地球真北方向的仪器。整个陀螺房系统所受外力矩有重力矩、空气摩擦阻力矩和悬挂带系扭矩等,当陀螺电动机不转时,陀螺房只相对于壳体运动,此时可以把它作为刚体围绕固定轴转动来加以分析。
这里还需说明一点,实际上,由于灵敏部的轴承里有摩擦,则使陀螺仪轴的摆动振幅在方位和高度上逐渐衰减。衰减程度决定于摩擦力矩的大小。摆动的性质决定于摩擦力矩是否保持一定,当摩擦力矩的大小和方向都不变时,陀螺轴衰减微弱的摆动具有规律性,即衰减系数f保持常数(图18-93)。
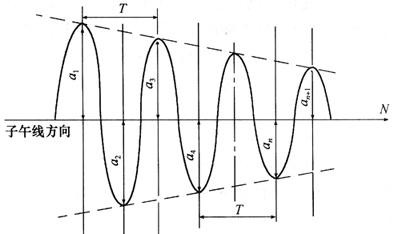
图18-93 衰减系数f保持常数

关于悬带扭矩可分为如下四种情况:
1)跟踪法零位为0时,此时悬带系扭矩项为零,即:

2)跟踪法零位为△α时,设扭矩系数为DB,扭力矩方向沿Ox轴,得:

3)中天法零位为0时,悬带系扭矩为:

4)中天法零位为△α时,悬带系扭矩为:

3.陀螺经纬仪的近似指北观测(初定向)
用陀螺经纬仪观测待定边的陀螺方位角,目的是把经纬仪望远镜视准轴置于近似北方。首先在待定测站点上安置陀螺经纬仪,脚架必须设置牢固,避免阳光直射,在井下巷道应避免在滴水和流水的地方设置仪器。将望远镜视准轴大致指向北方,指北观测可用以下几种方法进行。
(1)一般方法
启动陀螺电动机;达到额定转速时,下放陀螺灵敏部;松开经纬仪水平制动螺旋,用手转动照准部跟踪灵敏部的摆动,使陀螺仪目镜视场中移动的光标像与分划板零刻划线随时重合。当接近摆动逆转点时,光标像移动慢下来,此时制动照准部改用水平微动螺旋继续跟踪,达到东逆转点,读取水平度盘读数 ;松开制动类型,按上述方法继续反方向跟踪,达到西逆转点,再读取水平度盘读数
;松开制动类型,按上述方法继续反方向跟踪,达到西逆转点,再读取水平度盘读数 。锁紧灵敏部,制动陀螺电动机,计算近似指北方向在水平度盘上的读数为:
。锁紧灵敏部,制动陀螺电动机,计算近似指北方向在水平度盘上的读数为:

旋转照准部,把望远镜摆在N′读数位置,这时视准轴就指向了近似北方,然后进行下步精确指北观测。用此方法可使视准轴指向偏离真北方向30′以内,观测时间不超过10min。
(2)四分之一周期法
启动陀螺电动机,达到额定转速后,下放陀螺灵敏部。用手转动照准部进行跟踪,让陀螺仪目镜分划板零刻划线走在光标线前面,当光标像移动速度逐渐慢下来时(此时已接近逆转点),固定照准部,停止跟踪。待光标面与分划板零刻线重合时,启动秒表,光标线继续向前移动,到达逆转点后又向后移动,当光标面再次与分划板零刻线重合时,在秒表上读取时间t。此时不停秒表,用下式计算出时间t′:

式中 T1——跟踪摆动周期,可使用该地区观测值。
松开水平制动螺旋进行跟踪,使光标面与分划板零刻划线始终重合,同时观测秒表读数。当跟踪到t′时刻,立即固定照准部,停止跟踪,这时望远镜视准轴就指向近似北方。图18-94为观测过程示意图。用这种方法进行近似指北观测,可使望远镜指向偏离真北±10′以内,观测时间不超过6min。

图18-94 四分之一周期法原理图
(3)摆幅法
摆幅方法的精度比前述两方法稍高,但要求近似初始定向精度也较高,一般要求近似北方在1°以内。仪器结构不同,此法的操作程序也不一样。在JT 15和GAK-1等上架式陀螺仪附件中,要求摆幅不超过读数目镜视场。望远镜固定在近似北方后,仪器不再转动。陀螺移动到额定转速后,限幅并放下灵敏部,在读数视场内观测摆动,记录摆动指标线到达东、西逆转点时分划板上的读数aE和aW。aE和aW的代数和与真北偏差成正比,是近似北方N′与真北N之间的夹角,即:
△NK=(aE+aW)
K值随仪器分划尺格值和结构的不同而不同,也随纬度变化而变化。有些仪器的说明书给出了K值,如GAK-1型在纬度45°时K=6.2′,在纬度26°时K=5.9′。一般可用试验法求出K值。第一次试验让 偏东约1°,第二次试验让
偏东约1°,第二次试验让 偏西约1°,则得:
偏西约1°,则得:

解上述两式求K,则得:

将近似北方的度盘读数加上仪器常数和△N,转动照准部使度盘读数等于该值,此时望远镜便指向北方。此法所需时间约为4~7min,其精度就GAK-1型而言约为30′。
4.精密定向(逆转点法)
近似指北观测后,可按下述方法之一进行精确指北观测,也就是精确测定已知边和定向边的陀螺方位角。精确定向方法可分为两大类:一类是仪器照准部处于跟踪状态,多年来国内外都采用的逆转点法;另一类是仪器照准部固定不动,国外研究和提出的方法很多,如中天法、时差法、摆幅法及记时摆幅法等。目前广泛使用的主要有中天法。
逆转点法也称跟踪转点法。采用此法观测时,陀螺经纬仪在一个测站的操作程序如下:
1)严格整置经纬仪,架上陀螺仪,以一个测回测量待定侧线的方向值,然后将仪器大致对正北方。就是把望远镜视准轴摆在近似指北观测确定的近似北方在水平度盘上读数N′的位置,固定照准部,把水平微动螺旋调整到微动范围的中间位置。
2)测前零位观测。零位是指陀螺电动机不转时,陀螺灵敏部受悬挂带和导流丝扭力作用而引起的扭摆,其扭摆的平衡位置,就是扭力矩为零的位置,这个位置应在目镜分划板的零刻划线上。采用跟踪逆转点法观测时,灵敏部摆动的光标面应随时与目镜分划板零刻划线重合。如果悬挂带零位偏离分划板零刻划线,即产生零位变动,势必造成扭力影响。这个误差属于系统性误差,可通过零位改正加以补偿。若零位偏离过大,则应进入调整。
零位观测方法:下放陀螺灵敏部,观察目镜视场上光标面在分划板上的摆动,读出左与右摆动逆转点在分划板上的正与负格值,记入表18-15“测前零位”栏内。连续读入3个逆转点读数,观测过程如图18-95所示。按下式计算零位:
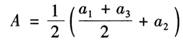
式中 a1、a2、a3——逆转点计数,以格计。
表18-15 陀螺仪定向观测记录手簿
测线名称:A-B 观测者:
仪器编号:DJ2-T20- 号(逆转点法) 记录者 日期:
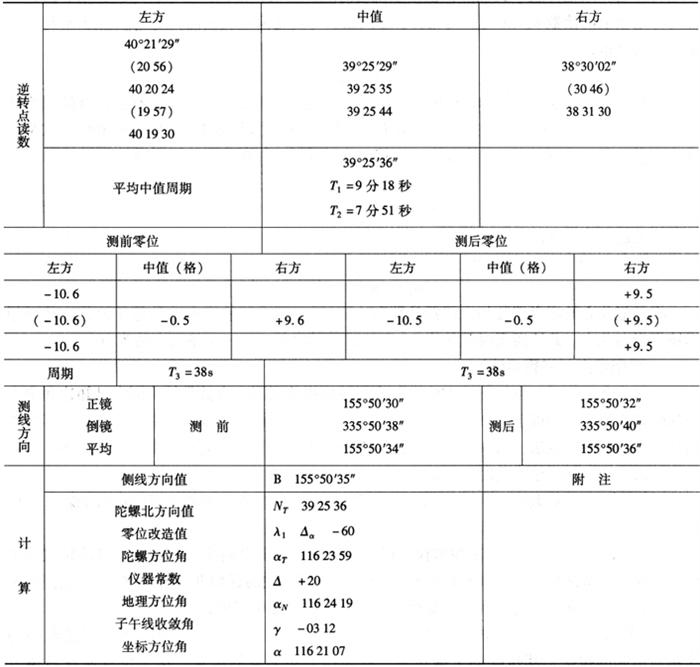

图18-95 测前零位观测
同时还需用秒表测定周期,即光标面穿过分划板零刻线的瞬时启动秒表,待光标面摆动一周又穿过零刻线的瞬间制动秒表,其读数称为自由摆动周期T3。零位观测完毕,锁紧灵敏部。
3)启动陀螺电动机,达到额定转速后,缓慢地下放灵敏部到半脱离位置,稍停3~5s,再全部下放。如果光标面移动过快,则使用半脱离阻尼限幅,使摆幅大约在1°~3°范围为宜。用水平微动螺旋微动照准部,让光标面与分划板零刻线随时重合,即时跟踪。在跟踪时,要做到平稳、连续,切忌跟踪不及时。例如,时而落后于灵敏部的摆动,时而又很快赶上或超前很多,这些情况都会影响观测结果的精度。
陀螺轴在子午线左右的摆动如图18-96所示,在平衡位置上,光标像行进速度最快,当接近逆转点时,速度渐渐慢下来,到达逆转点时,稍微停留片刻,此时应准确地使光标像与零刻划线重合,并地把逆转点相应于水平度盘上的读数计下来。然后向反方向继续跟踪,一次连续观测4~5个逆转点,读数u1、u2、…、u5后,锁紧灵敏部,制动陀螺电动机。

图18-96 陀螺轴在子午线左右的摆动
跟踪时,还需要用秒表测定连续两次同一方向经过逆转点的时间(图18-97中u1到u3或u2到u4的时间)。摆动平衡位置NT就是陀螺子午线在水平度盘上的读数,用下式计算:
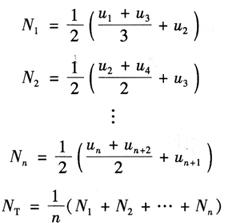
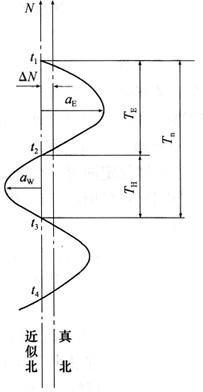
图18-97 中天法观测顺序
摆动中值的计算方法除舒勒平均值法外,还有相关平差法(即对称平均值法)。相关平差法即对称平均值法的计算公式为:

经分析研究,在满足定向精度要求的前提下,若从定向作业时便于检核观测成果,利于计算等因素来考虑,则舒勒平均值法优于其他方法,所以建议用逆转点法定向时,用舒勒平均值法计算陀螺摆动值。
4)测后零位观测:方法同测前零位观测。
5)以一测回测定待定侧线的方向值,前后两次观测结果的互差对J2和J6级经纬仪分别不得超过10″和24″。取测前测后两个测回的平均值作为侧线方向值。
6)按下式计算待定侧线陀螺方位角:
aT=B-NT+λ1·△α
式中 B——测线方向值;
NT——陀螺北方向值;
λ1·△α——零位改正项。
其中△α为零位变动,按下式计算:
△α=m·h
m——目镜分划板分划值;
h——零位格数;
λ1——零位改正系数,按下式计算:

T1——跟踪摆动周期;
T2——不跟踪摆动周期(与自由摆动周期测法相同)。
5.精密定向(中天法)
(1)基本原理
中天法又称穿过点时间法。此法要求起始近似定向达到+15′以内。在整个观测过程中,经纬仪照准部都固定在这个近似北方向上。
(2)一个测站的操作程序
中天法陀螺仪定向时一个测站的操作程序如下:
1)严格整置经纬仪,架上陀螺仪,以一个测回测定待定侧线的方向值,然后将仪器大致对正北方。
2)进行粗略定向。将经纬仪照准部固定在近似北方向N′上,并记录下N′值。在整个定向过程中,照准部始终固定在这个方向上。
3)测前零位光学。方法同逆转点的测前零位观测法。
4)启动陀螺电动机,达到额定转速后,下放灵敏部,经限幅后使光标像摆幅不超过目镜视场,但同时摆幅不宜过小,对于JT15和GAK-1型仪器,摆幅限在+8格和-8格左右较好。对于DJ2-T20仪器,摆幅限在+20格和-20格左右。然后按下列顺序观测(图18-97)。
灵敏部光标线经过分划板零刻划线时启动专用秒表(或用两只秒表,启动其中一秒表),依次记录光标面每次经过零刻划线的时间,称为中天时间,并记录如表18-16。相邻两次中天时间之差称为灵敏部摆动半周期。如果光标面经过中天后向东(右方)移动达到逆转点后,又向西移动而再次到中天时,则该两次中天时刻之差,对于DJ2-T20仪器称为陀螺北端轴经东大距摆动半周期TwE,并记为正号(对于DJ2-T60和GAK-1仪器则为西大距摆动半周期Tw,记为负号),反之为西大距摆动半周期Tw,记为负号(对于DJ2-T60和GAK-1仪器则为东大距摆动半周期TE,记为正号)。取TE和TW的代数和;求出时间差△t。△t/2是光标面从分划板零刻划线(近似北)至摆动平衡位置(子午线)的运动时间。
表18-16 中天法定向观测手簿
测线名称:B-D 观测者:
仪器编号:DJ2-T20 号(中天法) 记录者: 日期:

一次定向一般连续测定4~5个中天时刻。此外,当光标面到达逆转点时,须读取在分划板上的读数,以格数计,东为aE西为aW,取aE和aW绝对值的平均值,称为摆幅值a,只取一次读数即可满足要求观测完毕,锁紧灵敏部,制动陀螺电动机。
5)测后零位观测:方法同前。
6)以一测回观测待定侧线方向值。取前、后两次平均值作为待定侧线的最后方向值。
(3)测站计算
1)测线陀螺方位角计算
如图18-98和表18-16所列,以t1,t2,…,t5表示连续中天时刻,则摆动半周期:
TW(或TE)=t2-t1,
TE(或TW)=t3-t2,
…
时间差:△t=Tw(-)+TE(+),摆幅值:
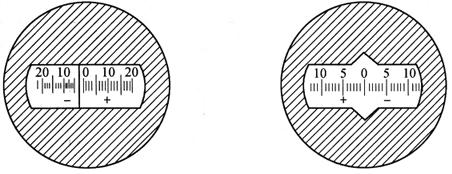
图18-98 分划板视场
按下式计算改正数(近似北偏离平衡位置的改正数):
△N=C·a·△t
式中 C——比例系数。
陀螺子午线(摆动平衡位置)在水平度盘上的读数应为:
NT=N′+△N=N′+C·a·△t
按下式计算测量陀螺方位角:
αT=B-NT+λ2·△α=B-(N′+C·a·△t)+λ2·△α
式中 B——侧线方向值;
N′——近似北度盘读数;
λ2·△α——零位改正项,其中为零位变动,λ2为不跟踪零位改正系数,按下式计算:

2)利用实际观测数据求定比例系数C
把经纬仪精确地安置在地面已知边的一端,架上陀螺仪,继续粗略定向(安装边的坐标方位角、子午线收敛角及仪器常数均考虑进去)。然后做两次试验,即将经纬仪照准部摆在偏东10′和偏西10′左右,分别用中天法观测,求出时间差△t1和△t2,以及摆幅值a1和a2(表18-15、表18-16),这样就可列出如下方程式,以求解C值。

解得:
C值与地理纬度有关,在同一地区南北不超过500km范围内,可使用同一C值,超过这个范围须重新测定,隔一定时间后应抽测检查。当仪器更换了悬挂带或进行修理后也应重测C值。
3)利用摆动周期计算比例系数C
根据力学推导可得中天法比例系数近似为:

式中 m——分划板分划值;
T1——跟踪摆动周期;
T2——不跟踪摆动周期。
因为上式是取正弦函数一级近似推导出来的,只有△t小到一定程度才符合这种近似式,所以要求△t不大于30s,不小于15s。