衡量方法和衡器分类
出处:按学科分类—工业技术 企业管理出版社《计量专业工程师手册》第233页(4959字)
1.衡量、衡量原理和衡量方法
衡量是对被称物体的质量所进行的测量,也叫称量或称重。这里有必要强调:物体在特定参考系中的重量,是使该物体在此参考系中获得其加速度等于当地自由落体加速度时的力。当使参考系为地球时,此量常称为物体所在地的重力。值得注意的是,重量不仅与物体所在地的引力的合力有关,而且与由于地球自转引起的当地离心力有关。由于浮力的作用被排除,因此,所定义的重量是真空中的重量。“重量”一词按照习惯仍可用于表示质量;但是,不赞成这种习惯。
实际上重力是地面附近物体受到的地球引力,与因地球自转使该物体具有的惯性离心力的矢量和。在不同纬度处,由于地球引力与惯性离心力的大小及其夹角不同,致使重力的大小随纬度而变化。同一物体在赤道上受到的重力,要比两极小约1/300;而物体的质量却是不变的。
衡量原理是指衡量所利用的科学基础,通常分为质量比较原理、力比较原理和其它原理三类。例如经典的杠杆力矩平衡,属于质量比较原理。常见的电磁力平衡、弹性元件变形以及陀螺二次进动等,属于力比较原理。核子皮带秤利用辐射衰减来测量传输过程中物料的重量,则属于其它原理。
衡量方法有直接衡量法、交换衡量法、替代衡量法、连续替代衡法、零位衡量法等。
(1)直接衡量法是将被称物体的质量,直接与砝码或样品的已知质量相比较,也叫简单衡量法或比例衡量法。衡量时先将衡器调到零位,再把被称物体放到承载器(秤盘)上,被测的质量可以直接读出,或者可以通过把衡器指示装置调整到中部位置来确定。例如用杆秤或电子计价秤时,可以直接读出示值或打印出示值。用等臂天平进行直接衡量时,可以按照下列程序:①读出空载时的平衡点n0;②将质量为x的被称物体置于左盘,质量为M的砝盘置于右盘,使天平处于平衡并使平衡点位于标牌的中部,然后读取此时的平衡点n1;③将质量为Δ的微小砝码置于左盘或右盘,读出平衡点nΔ,此时需选择Δ的大小和置于哪一个盘中,以使n0介于n1和nΔ之间。被测的质量x可由下式求得:

式中 EM——砝码的器差。
这种方法衡量简便,但存在臂比误差,适用于普通衡量。
(2)交换衡量法是将被称物体与已知质量的砝码或样品,在等臂天平的秤盘上至少交换一次位置,也叫高斯法。有单次交换和双次交换之分,我国主要采用单次交换衡量法,其程序如下:①将质量为x的被称物体置于右盘,质量为M1的平衡砝码置于左盘,使平衡点位于标牌的中部,然后读取此时的平衡点n1;②交换左右两盘中的被称物体和砝码,增加或减少砝码到质量为M2,使天平处于平衡并使平衡点位于标牌的中部,读取此时的平衡点n2;③将质量为Δ的微小砝码置于左盘或右盘,读出平衡点nΔ,此时需选择Δ的大小和置于哪一个盘中,以使n1介于n2和nΔ之间。被测质量x可由下式求得:

式中 E1——质量M1砝码的器差;E2——质量M2砝码的器差。
这种方法基本上消除了天平不等臂误差的影响,提高了测量准确度,适用于精密衡量。
(3)替代衡量法是用砝码或样品的已知质量来替代被称物体的质量,使指示装置有相同效应,也叫波尔达法。衡量时将被称物体和已知质量的砝码,先后与同一个辅助载荷(配重)进行比较。例如用等臂天平进行替代衡量时,可以按照下列程序:①将质量为x的被称物体置于右盘,并将质量与x相当的配重置于左盘,使天平处于平衡并使平衡点位于标牌的中部,然后读取此时的平衡点n1;②从右盘取下被称物并代之以质量为M的砝码,使平衡点位于标牌的中部,读取此时的平衡点n2;③将质量为Δ的微小砝码置于左盘或右盘,读出平衡点nΔ,此时需选择Δ的大小和置于哪一个盘中,以使n1介于n2和nΔ之间。被测的质量x可由下式求得:

式中 EM——砝码的器差。
这种方法基本上消除了臂比误差的影响,测量准确度高,适用于精密衡量。
(4)连续替代衡量法是不论被称物体的质量大小如何,使天平始终处于某固定载荷下工作,也叫门捷列也夫法。此法适用于组合砝码的检定:在天平秤盘上按质量大小的顺序取下标准砝码,再用被检砝码逐一替代,从而使秤盘上砝码的总量不变。此法的特点是:天平在同一灵敏度下使用,消除了不等臂误差的影响,加快了测量的速度。
2.衡器及其分类
衡器是利用作用于物体上的重力等各种衡量原理,确定物体的质量或作为质量函数的其它量值、数值、参数或特性的一种计量仪器,也叫称量仪器或称重仪器。在我国,属于强制检定的计量器具之一。衡器的主要组成部份包括:①接受被称物体载荷的承载器;②将此载荷所产生的力或其它效应,等量地或以一定缩比传递到平衡机构的载荷传递装置;③借助于平衡机构、指示装置或(及)打印装置来显示质量值的载荷测量装置。
测量结果通常用下述方法中的一种或几种来获得:①放在砝码接受器上的标准砝码值,或考虑了其载荷缩比后的值;②由指示装置显示的值;③由打印装置传出的票据。
根据衡器的不同功能或特征,可将衡器分为不同的种类。例如:根据衡器准确度等级的不同,可将其分为天平和秤;根据衡量过程中是否需要操作者参与,可分为非自动衡器和自动衡器;根据是否装有称重传感器等电子装置,可分为机械衡器和电子衡器。连同其它设备组合起来,完成特定称量任务的衡器,常称为称量系统或称重系统。
(1)非自动衡器是在衡量过程中需要操作者参与的一类衡器。例如需要由人向承载器装卸载荷,以及由人获取称量结果或示值。这类衡器可以是有分度的或无分度的;自行指示的、半自行指示的或非自行指示的。划分非自动衡器准确度级别的主要依据是:①代表衡器绝对准确度的检定分度值e;②代表衡器相对准确度的检定分度数n;③最小秤量Min,当衡器在小于Min的小载荷使用时可能会带来过大的相对误差。国际法制计量组织(OIML)将非自动衡器划分成四个级别:特种准确度级、高准确度级、中准确度级、普通准确度级,其要求列于表5.2-1。各个级别衡器的最大允许误差,又叫衡器的极限误差,它们是随着载荷增加而阶跃式放宽的绝对误差带,其要求列于表5.2-2。衡器随后检定的最大允许误差,与首次检定时相同。经过检定的衡器,在使用过程中误差会逐渐变化,所以OIML又规定使用中衡器的最大允许误差,放宽为首次检定时的两倍。
表5.2-1 非自动衡器的准确度级别的划分

表5.2-2 非自动衡器的最大允许误差

注:m表示被称载荷的质量;e表示检定分度值。
(2)自动衡器是在衡量过程中不需要操作者参与,并按照预定的程序自动工作的一类衡器。例如连续累计自动秤、重量分类自动秤、重力式自动装料秤、非连续累计自动秤以及自动轨道衡等。自动衡器的准确度级别,是按使用中的相对误差来划分的,其要求列于表5.2-3
表5.2-3 自动衡器的最大允许误差

自动衡器的静态准确度,是它按非自动衡器检定方法检定时应达到的准确度。对于0.2级和0.5级自动衡器,其静态准确度通常应符合非自动衡器的中准确度级别的要求;而对于1.0级和2.0级,通常应符合非自动衡器的普通准确度级别的要求。
(3)机械衡器是由机械构件组成,其载荷的平衡和补偿均依靠机械方法实现的一类衡器。特别是指衡器的载荷测量装置是机械的、光学的或其他非电方式的。例如:各种形式的机械天平和机械秤。对于大部分现存的机械衡器,特别是工业秤,将面临大量的电子化改造的艰巨任务。即把机械杠杆系统与称重传感器结合起来,从而获得被称物体重量的电信号输出,以适应自动打印数据和计算机处理的要求。
(4)电子衡器是配备有电子装置的衡器,其功能是把被称物体的质量转换为与之成正比的电信号,并由此产生数字式或模拟式指示的质量信息。全电子衡器或纯电子衡器,是指载荷传递装置中没有机械杠杆,载荷测量装置中只用称重传感器进行称量的一种电子衡器。机电衡器是指由机械杠杆系统和称重传感器混合而成的,由手动或电子方式驱动指示或打印装置的一种电子衡器。
如图5.2-2所示的电子衡器,被称物体需由操作者参与而置于其承载器,并直接作用到称重传感器上,从而把质量变换成电信号。量值求取部分包括处理信号的电子线路,如放大器、模数转换器、电源、保护线路等。数据输出部分包括显示器及其打印机等外围设备。在称重系统或称重成套设备中,各功能块可以利用接口分离开来,其数据可以由电缆传输(a),或者无线传输(b)。
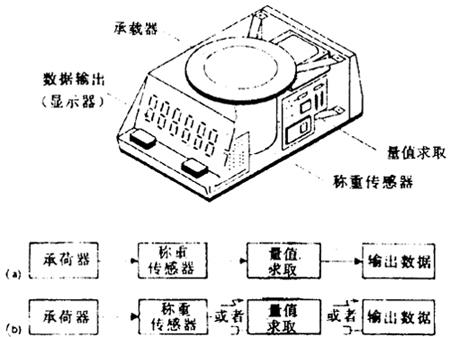
图5.2-2 电子衡器结构示意图
电子衡器中所用的称重传感器,目前以电阻应变式居多。它由电阻应变计(片)、弹性体和某些附件组成,当被称物体或标准砝码作用在传感器上时,弹性体产生变形,应变计的电阻随之发生变化并通过测量电桥产生信号输出,参见公式5.3-10。
最近,振弦式称重传感器已成功地用于电子计价秤和小台秤上,它是利用张紧的振弦的固有频率与其张力间的关系,将质量转换成频率变化的一种数字式传感器。陀螺式称重传感器利用三自由度陀螺的二次进动角速度与物体质量成正比的原理,将被称质量直接转换成数字信号。由于它是一种无位移的力平衡方式,不受弹性定律的限制,也无需从被测量中吸取能量,因而无滞后现象、抗干扰能力强,在工业称重系统中正在得到开发和应用。
【参考文献】:
[1]鲁绍曾主编,现代计量学概论第11章力学计量,中国计量出版社,1987。
[2]王江主编,现代计量测试技术第16章力学计量技术,中国计量出版社,1990。
[3]王立吉,现代计量测试发展动态,现代计量测试,1993;1∶3~9。
[4]鲁绍曾主编,计量学辞典,中国计量出版社,1995。
[5]施昌彦,王大充,液压式标准测力机的有效面积和压力波动,计量学报,1986;4∶296~304。
[6]施昌彦,测力称重计量的某些发展动向,现代计量测试,1994;6∶2~4。
[7]天津市计量管理局编,力学计量,中国计量出版社,1985。
[8]国家技术监督局编,国家计量检定系统,中国计量出版社,1991。